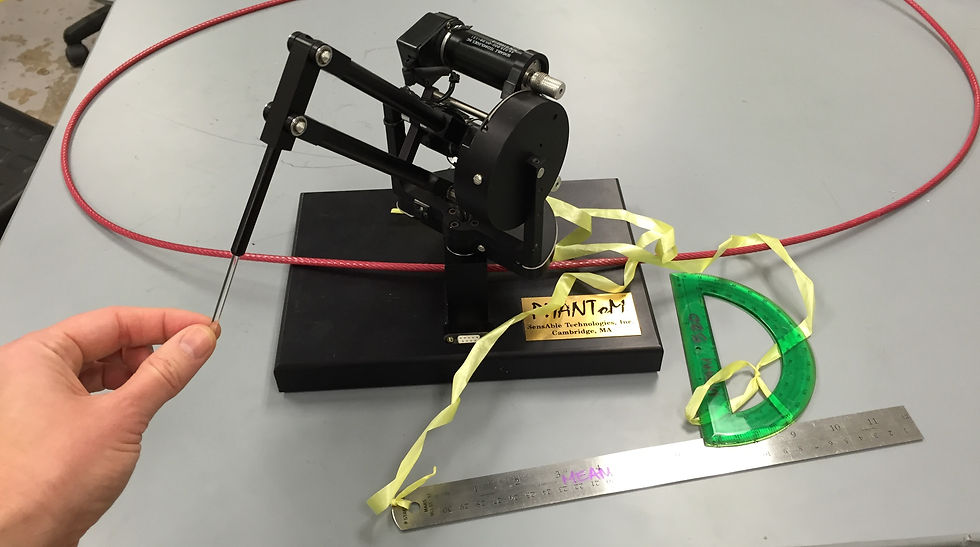
Interactive Virtual Environment with Phantom
In this project, we used SensAble Phantom Premium 1.0 robot: an impedance-type kinesthetic haptic interface with three actuated rotational joints. Using MATLAB, we programmed a custom virtual environment. We were also exposed to gravity compensation, trajectory tracking, and several different types of haptic virtual environments.
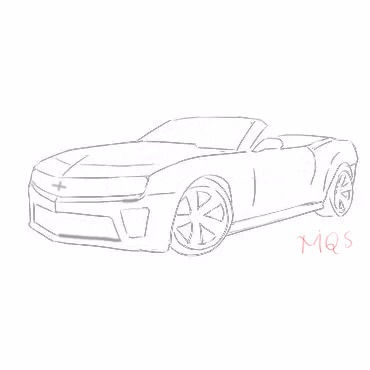
In this project, I worked with 2 teammates and wrote MATLAB code to make PUMA 260 robot draw a car in the air with a colored light, which we capture by taking a long-exposure photograph. The project was divided into three components:
-
In the first component, we solved robot's full inverse kinematics
-
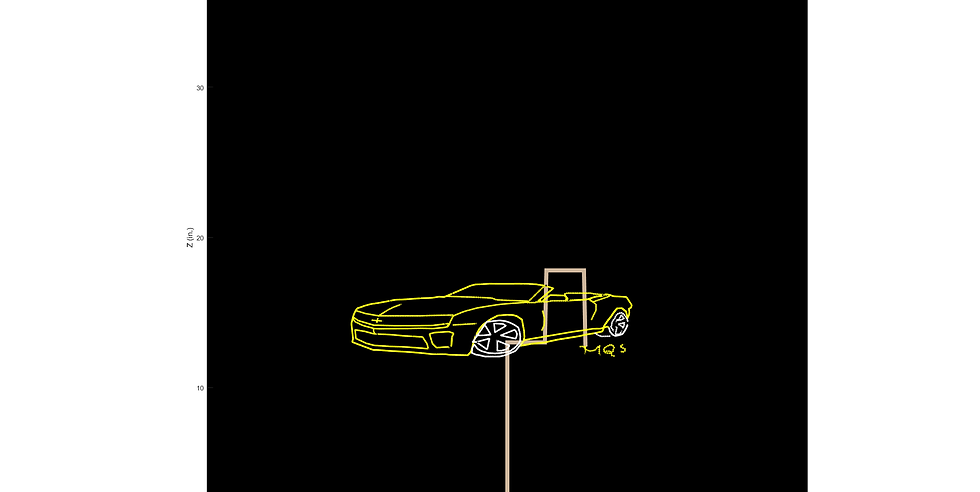
In the second part, we used our inverse kinematics to create the actual light painting in simulation
-
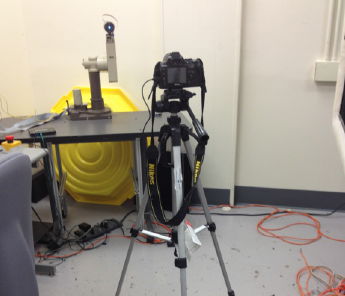
In the third part, we recorded our light painting with the actual robot
Real Light Painting with the PUMA 260
Skills: MATLAB, Dynamics, Forward & Inverse Kinematics, Trajectory Planning, Haptics
Robotics
go to Projects on: